










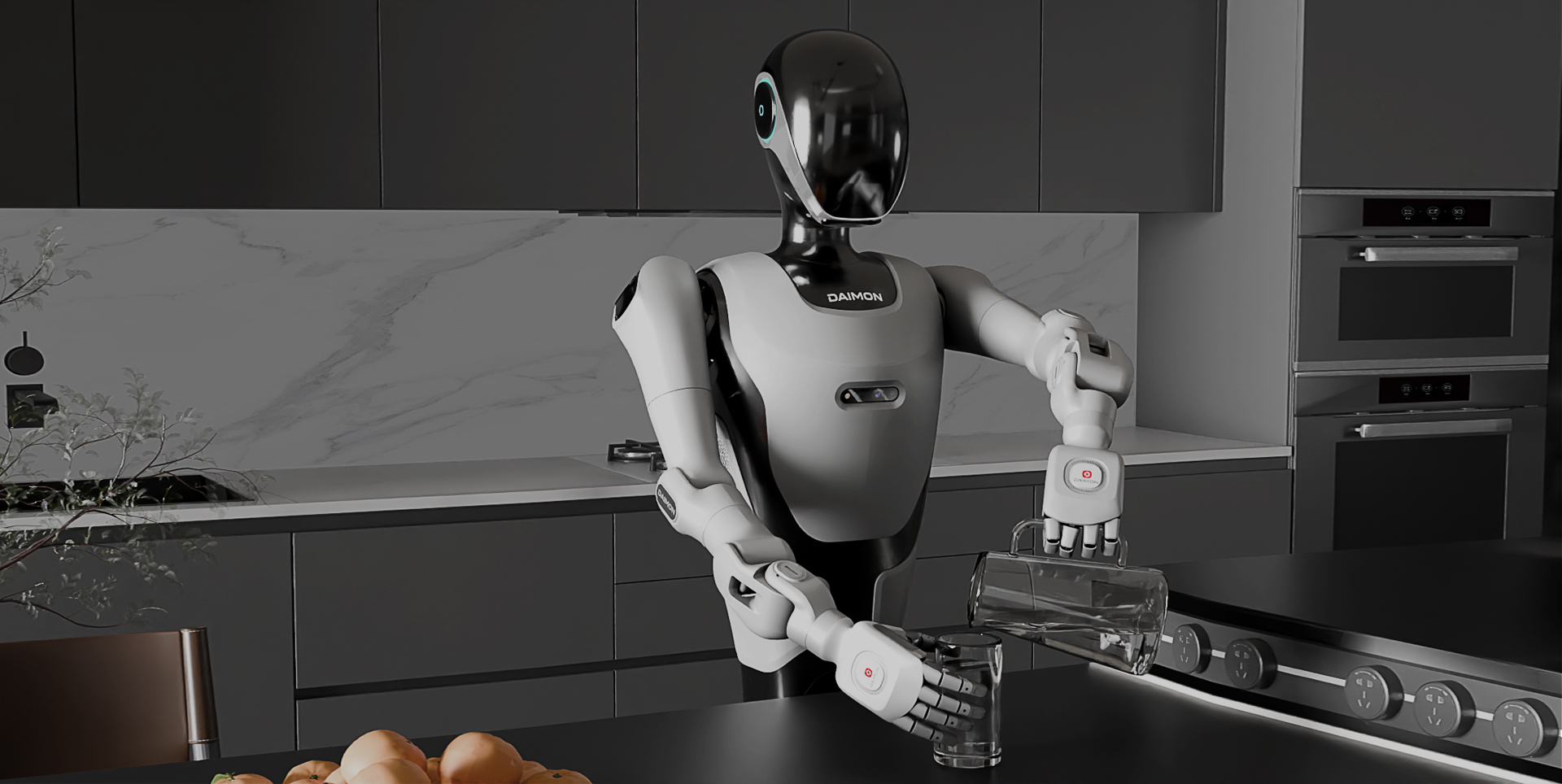
By integrating the Daimon One multimodal model, robots are capable of doing chores such as washing dishes and wiping windows etc. It is widely applicable in home services, enabling closed-loop decision making.

The combination of high-precision tactile feedback and dexterous hand technology enables accurate recognition of object size, weight, and other material properties. It allows the grasping of various objects, such as fragile items and irregular components, and guarantees safety and stability throughout the process.

Our tactile sensors provides high-resolution tactile feedback for real-time analysis of components. Enables precise operations such as plug-and-play assembly, electronic component handling, and various material manipulation.

The intelligent biochemical laboratory leverages multimodal tactile-visual fusion technology to perceive key attributes such as the size, status, weight, and position of test tubes. It enables precise manipulation of hazardous reagents and fragile samples, significantly improving automated experiment efficiency while avoiding human exposure to biochemical contamination.



