












Integrates self-developed vision-based tactile sensors, accurately reproducing light touch sensations.
Millisecond-level command synchronization for seamless human-robot collaboration without lag.

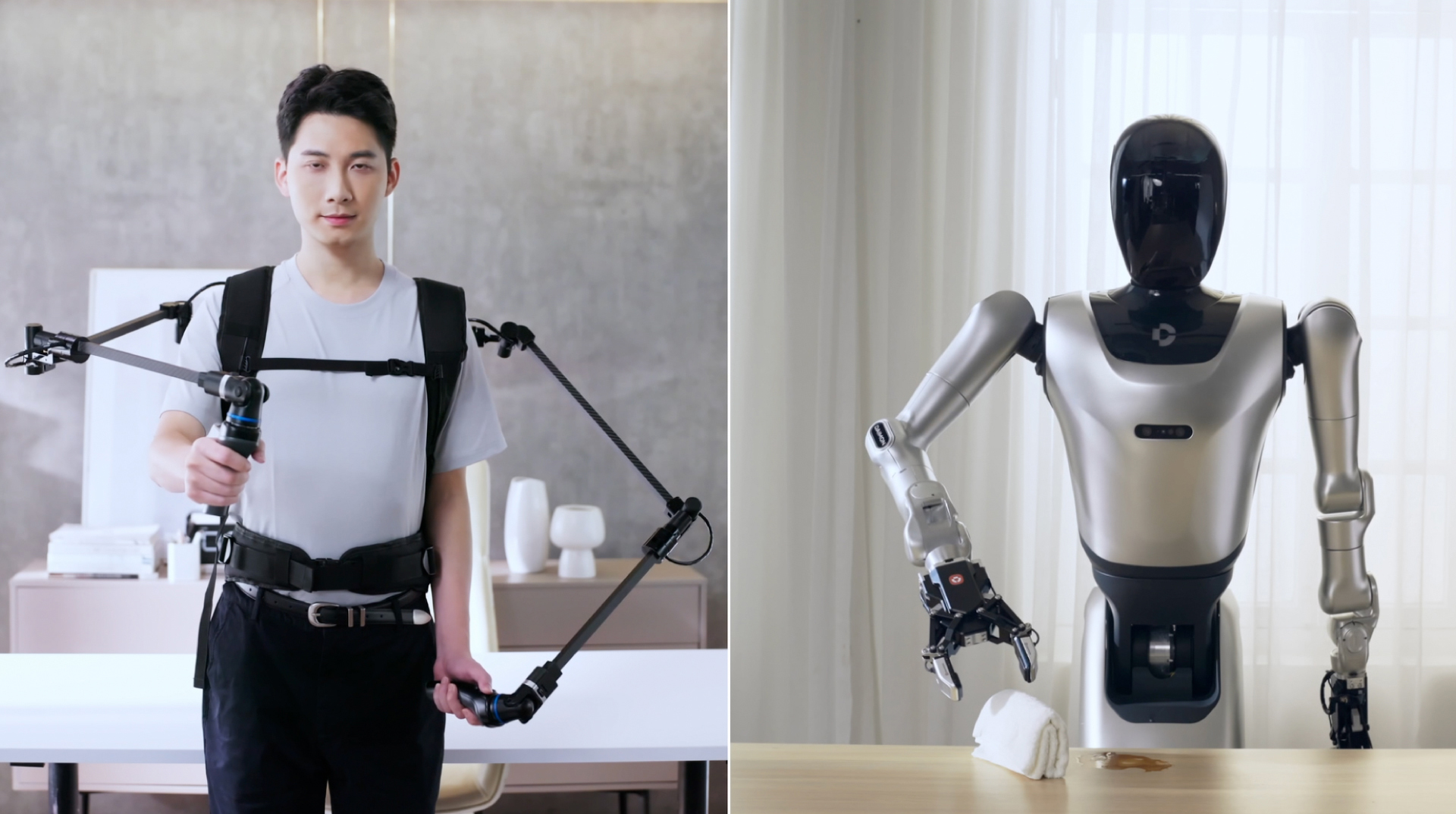
Supports coordinated whole-body robot teleoperation
(including mobile chassis and waist joint actuation) to cover complex operational scenarios.

One-touch switching of master-slave mapping relationships,
accommodating both fine manipulation and large-motion scenarios.

Snap-fit design enables quick switching between controlpads and gloves,
flexibly adapting to various end-effectors for "one device for multiple uses".
Product Model | Stand-Mounted Version | Backpack Version |
Weight | 20kg | 4.0kg |
Dimensions | 990mm*947mm*1850mm (including stand) | 597mm*200mm*822mm |
Degrees of Freedom | 12 | |
Sampling Frequency | 1000Hz | |
Communication | Ethernet / WiFi | |
Angular Resolution | 0.01° | |
API Interface | C++ / ROS 1 / ROS 2 | |
Encoder Type | Single-turn Absolute | |
Battery Specs | 25.9V 5Ah | |
Operation Time | ≥8h | |
Charging Method | Manual Charging | |
Charging Time | ≤2h | |
Battery Quick-Release | Supported | |
LED Indicators | Status, Fault Alarm, Battery Level, etc. | |
Vibration Indicators | Button Press, Exception Alerts | |
Operating Temperature | 0~40°C | |
Operating Humidity | 10~90%RH (non-condensing) | |
Air Environment | Free of dust, flammable, explosive, or corrosive gases | |



