With rich sensing modalities and ultra-high spatial sensing resolution,
it addresses a key challenge in robotics — allowing grippers and
dexterous hands to perform fine tasks accurately
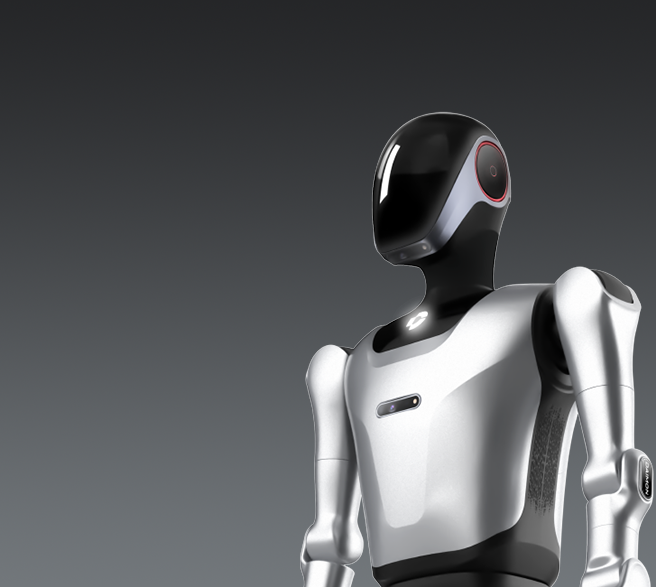
To create robots that are more intelligent and dexterous than humans, integrate them into society as helpful companions for everyone, and
bring benefits to humanity.