首页
产品中心
视触觉传感器
• DM-Tac W
• DM-Tac W2
• DM-Tac X
• DM-Tac F
视触觉夹爪
• DM-Tac G
全新一代遥操作数采系统
• DM-EXton2
含触觉的操作模型
• Daimon One
端侧AI计算平台
• DM-Flux
视触觉传感器
DM-Tac W
视触觉传感器
DM-Tac W2
视触觉传感器
DM-Tac X
视触觉传感器
DM-Tac F
视触觉夹爪
DM-Tac G
全新一代遥操作数采系统
DM-EXton2
含触觉的操作模型
Daimon One
端侧AI计算平台
DM-Flux
应用场景
具身智能
智慧物流
智能制造
实验室自动化
关于戴盟
公司介绍
企业文化
荣誉资质
加入我们
联系我们
新闻资讯
cn
/
en
触觉高维进化 觉醒具身智能
立即咨询
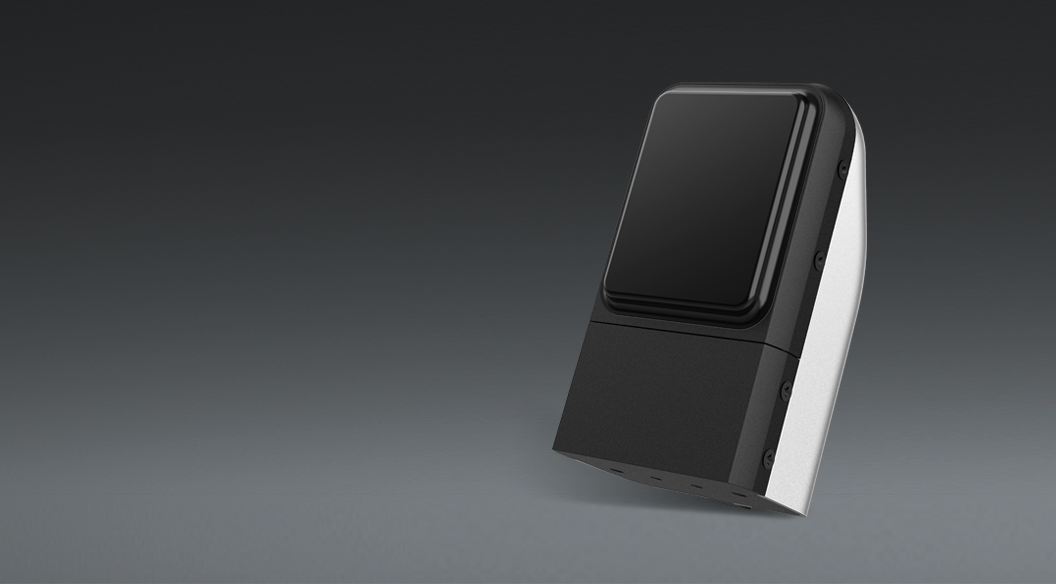
视触觉传感器
多模态触觉感知终端,助力灵巧操作
探索更多
视触觉夹爪
精准抓取,灵活掌控
探索更多
全新一代遥操作数采系统
让操作更简单、采集更高效
探索更多
含触觉的操作模型
多模态VTLA ( Vision Tactile Language Action)
具身操作模型
探索更多
端侧AI计算平台
强大边缘算力,赋能机器触觉感知
探索更多
核心技术
多维触觉感知系统
全球首款毫米级量产多模态、高分辨率视触觉传感器
感知数据采集矩阵
含触觉,视觉等多模态数据采集软硬件方案
具身智能操作模型
含触觉多模态的具身操作模型,
赋能机器人灵巧操作完成精细任务
应用场景
精细操控能力,高难度任务执行
探索更多
柔性化与高效协同的智能升级
探索更多
工业4.0的核心感知层
探索更多
赋能智慧实验室,提升实验效率
探索更多
具身智能
智慧物流
智能制造
实验室自动化
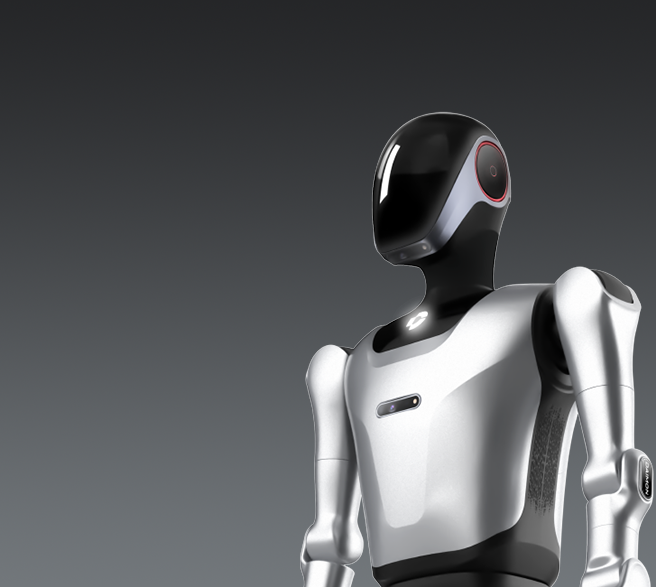
戴盟机器人
突破物理世界感知极限,构建人机共存和谐世界
探索更多