










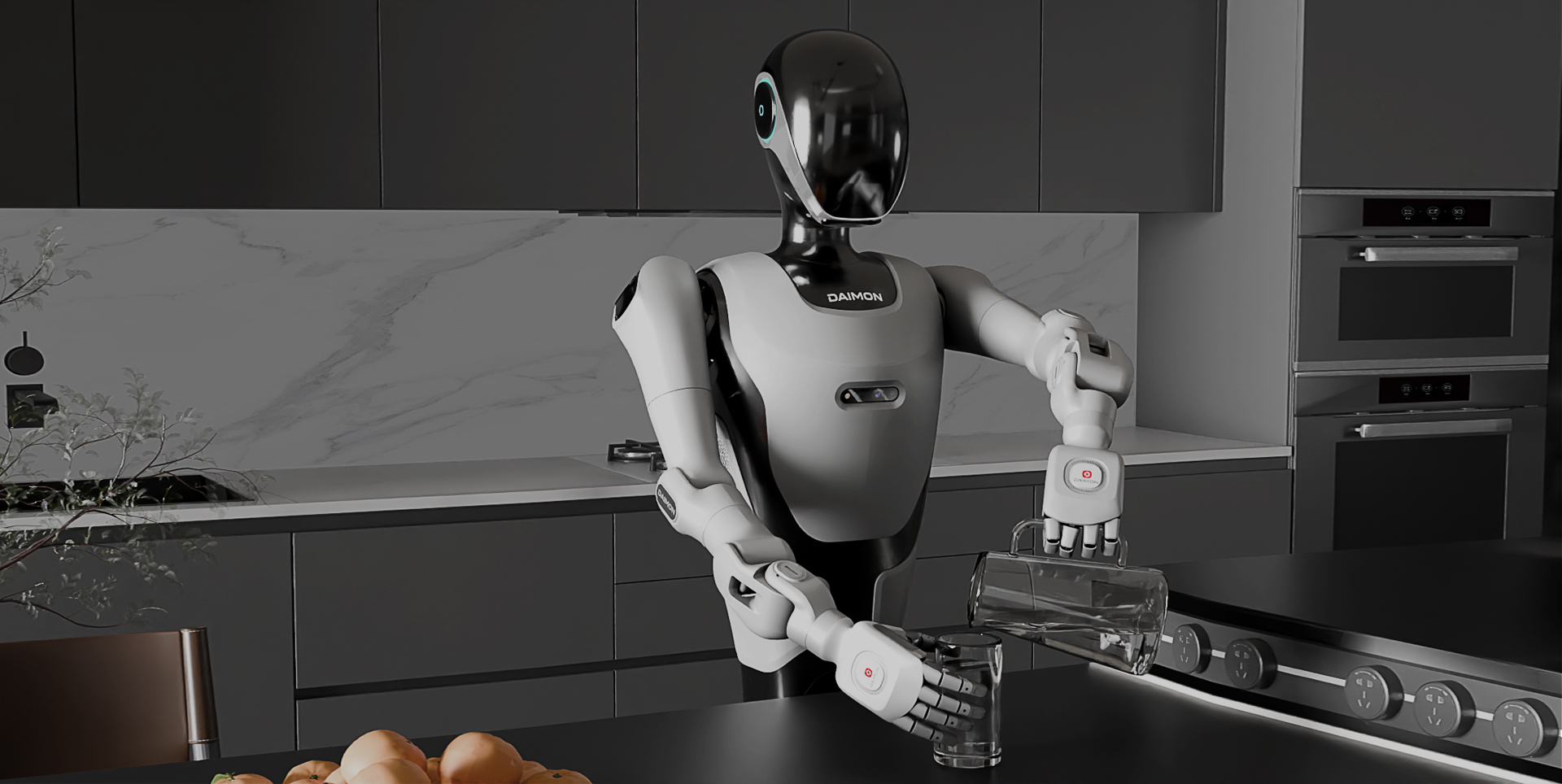
结合Daimon One多模态模型,机器人可完成抓取、旋拧等高难度任务,应用于家庭服务等场景,实现“感知-决策-执行”闭环控制。

高精度触觉反馈与灵巧手技术的结合,可精准识别物品尺寸、重量及材质特性,轻松夹取不同形态物品(如易碎品、异形件),确保物品搬运过程中的安全性与稳定性。

为夹爪等末端执行器提供多维度触觉感知能力,可实时解析工件形貌、材质软硬及装配力度,适配汽车制造、电子组装等场景。除了夹爪以外,自由度更高的灵巧手能完成线材插拔、物料组装等精细动作,进一步提高产业化能力和智能性。

智能生化实验室通过多模态触觉视觉融合感知技术,可感知试管大小、状态、重量、位置等特性,轻松实现高危试剂与易损样本的精准操作,避免人员暴露于生化污染风险。




